Co raz częściej do paletyzacji wykorzystuje się roboty przegubowe i portalowe.
Programowanie robotów często obywa się w ramach procesu teach-in, tzn. robot musi wykonać czynności chwytania, podparcia i odkładania dla każdego opakowania, a te ruchy muszą być zapisane.
Programowanie schematów paletyzacji może potrwać wiele godzin, podczas tego czasu robot nie może pracować na produkcji.
MultiPack udostępnia współrzędne opakowania konieczne do opracowania schematu paletyzacji, które są wynikiem procesu optymalizacji załadunku. Za pomocą rozszerzeń do poszczególnych urządzeń ‚MultiPack for robots‘ oblicza punkty chwytania, podparcia i odkładania, konieczne do przeprowadzenia procesu paletyzacji. Na tym etapie trzeba uwzględnić specyficzne właściwości robotów i chwytaków, jak np. MultiPick (pobranie kilku paczek) oraz MultiPlace (ułożenie wszystkich pobranych paczek) lub SinglePlace (ułożenie pojedynczych paczek lub mniejszych grup). Do każdego schematu ułożenia MultiPack oblicza taki cykl chwytów, który zapewnia minimalną ilość ruchów, a co za tym idzie maksymalne wykorzystanie robota. Proces paletyzacji można zwizualizować w 2D lub 3D.
Multiscience wdrożyło szereg możliwości przekazywania danych sterujących do robota, począwszy od przekazywania plików ASCII, aż po bezpośredni dostęp do modułów pamięci programów sterujących robotami i zastosowanie interfejsów S5 i S7.
W obszarze robotów paletyzujących Multiscience współpracuje ze znanymi producentami robotów, ale także z wieloma mniejszymi firmami o wąskiej specjalizacji.
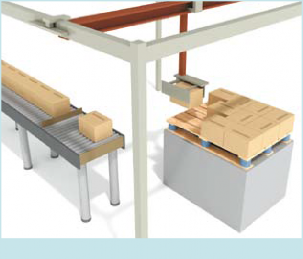
Robot portalowy z uchwytem zaciskowym
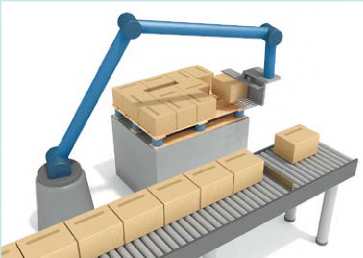
Robot przegubowy z chwytakiem widłowym
